
ITER prépare l’orchestre robotique qui assemblera le cœur du réacteur.
Construire un réacteur de fusion comme ITER ne consiste pas seulement à empiler des pièces géantes de plusieurs centaines de tonnes. Une fois la chambre à vide installée, commence un autre chantier titanesque, moins visible mais tout aussi complexe : équiper son intérieur de près de 20 000 composants, chacun fabriqué sur mesure et disposé avec une précision millimétrique !
Pour réussir cet exploit, les ingénieurs d’ITER ont lancé un véritable « programme dans le programme » consistant à développer les robots, les outils et les procédures qui permettront d’installer ces milliers d’éléments dans un espace étroit, encombré et extrêmement sensible.
Lire aussi :
- Le Royaume-Uni prépare un monstre capable de torturer le plasma dans tous les sens pour rapprocher l’humanité de la fusion nucléaire
- Cet « effet papillon » du plasma démontré par une équipe coréenne aura de grandes répercussions sur la fusion nucléaire : l’interaction multiscalaire
ITER va utiliser Godzilla, le plus puissant robot du monde pour monter les 20 000 composants de son intérieur
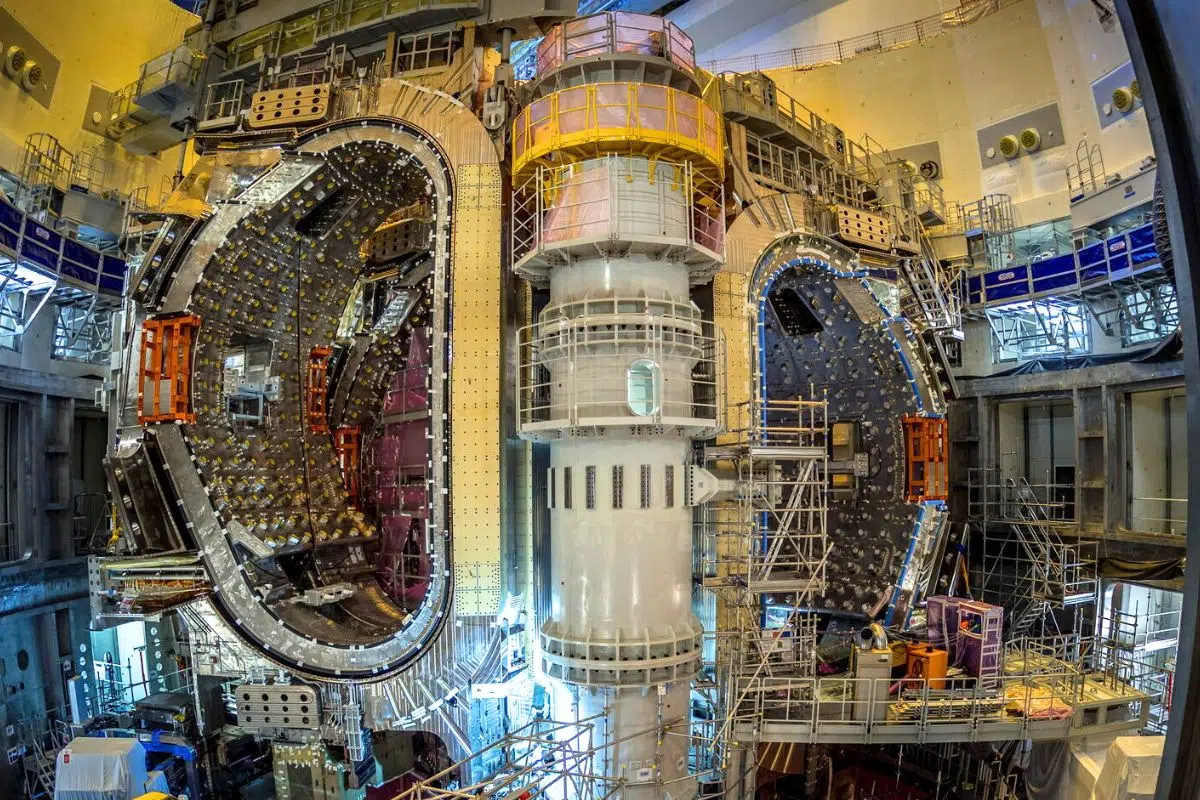
L’intérieur de la chambre à vide d’ITER ne ressemble pas à une simple paroi métallique.
Il s’agit plutôt d’une structure stratifiée, comparable à un oignon d’acier composé de plusieurs couches fonctionnelles.
On y trouve notamment :
- les bobines de stabilisation verticale du plasma
- les systèmes de contrôle des instabilités
- les modules de couverture (blanket modules)
- les panneaux de première paroi directement exposés au plasma
Chaque couche comprend plusieurs milliers de pièces, qui doivent être assemblées dans un ordre précis.
L’opération est d’autant plus délicate que certaines pièces dépassent plusieurs tonnes et doivent être positionnées avec une précision extrême pour ne pas compromettre les performances du réacteur.
Une stratégie d’assemblage inspirée d’une « vague roulante »
Plutôt que de travailler étape par étape, les équipes d’ITER ont imaginé une organisation beaucoup plus dynamique.
Les robots et les équipes humaines avanceront selon un principe de « vagues roulantes » : pendant qu’une équipe installe une couche de composants dans une zone de la chambre à vide, la suivante commence immédiatement à travailler sur la couche suivante dans une autre zone.
Ce fonctionnement parallèle permet de réduire fortement les délais et les risques d’erreur, tout en optimisant l’utilisation des robots et des outils spécialisés.
Raphaël Hery, spécialiste en robotique pour environnements extrêmes, résume l’idée avec une image simple : les robots et les opérateurs devront travailler comme un orchestre symphonique, chacun exécutant sa partition au moment exact.
Godzilla, le robot géant chargé de préparer l’assemblage
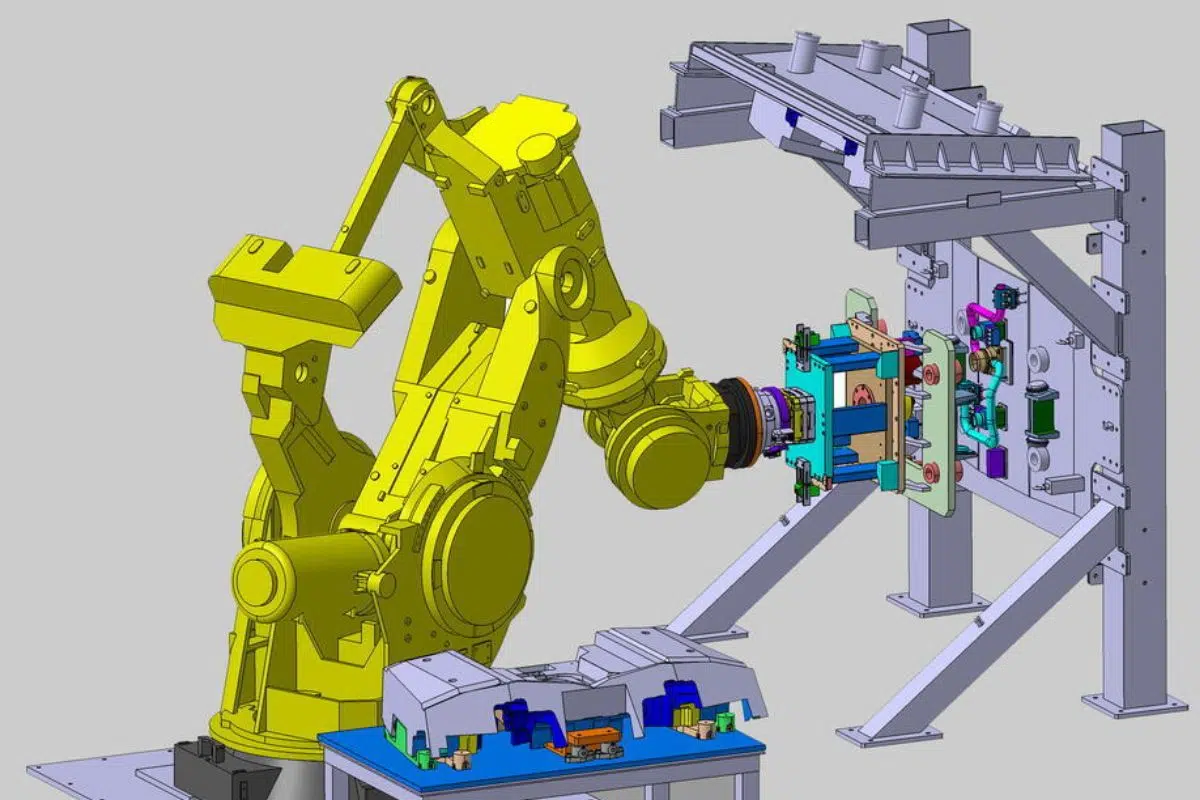
Pour mettre au point ces outils, ITER s’appuie sur une plateforme expérimentale spectaculaire : un robot industriel surnommé Godzilla.
La machine impressionne :
- 4 mètres de hauteur
- bras de 5 mètres de portée
- capacité de levage de 2,3 tonnes
Godzilla n’installera pas directement les composants du tokamak.
Son rôle est de servir de banc d’essai pour tester les technologies robotiques qui équiperont les machines chargées d’intervenir dans la chambre à vide. L’enjeu est immense : l’assemblage de près de 20 000 composants à l’intérieur du tokamak, avec une précision millimétrique, constitue l’un des défis industriels majeurs du programme ITER. Pour y parvenir, il faudra orchestrer plusieurs systèmes robotisés capables d’enchaîner les tâches en parallèle, dans un espace extrêmement contraint.
Ce travail s’appuie sur une coopération industrielle internationale. En France, CNIM Systèmes Industriels fournit le bras télémanipulateur principal. En Inde, le groupe Larsen & Toubro Ltd. est chargé de concevoir le robot d’assemblage de la couverture du tokamak, une machine colossale destinée à installer les modules internes du réacteur. L’entreprise espagnole Metromecánica, spécialisée dans la métrologie industrielle, a de son côté développé un système automatisé capable de mesurer avec précision les écarts dimensionnels entre les composants, technologie qui a depuis trouvé des applications jusque dans l’industrie automobile.
Des robots capables de « voir » et de « sentir »
Les robots industriels classiques savent manipuler des objets lourds, mais ils manquent de deux capacités essentielles dans un environnement aussi sensible : la vision et le toucher.
Les robots développés pour ITER seront donc équipés de :
- systèmes de vision avancés, capables d’aligner précisément un outil sur sa cible
- capteurs de force et de couple, qui permettent de détecter les contraintes mécaniques et d’ajuster les mouvements
Dans un environnement aussi dense que la chambre à vide, ces fonctions sont indispensables pour éviter toute collision ou contrainte excessive sur les composants.
Des machines encore plus gigantesques en préparation
Godzilla n’est qu’un outil de développement.
Les robots qui interviendront réellement dans ITER seront bien plus impressionnants.
Le futur robot d’assemblage de la couverture, par exemple, pèsera 36 tonnes, soit trois fois plus que la plateforme de test actuelle.
Il est actuellement conçu par l’industriel indien Larsen & Toubro, tandis qu’un manipulateur mobile développé initialement par CNIM sera modernisé pour participer aux opérations.
Plusieurs machines travailleront simultanément :
- deux robots d’assemblage de couverture
- un manipulateur mobile
- un manipulateur de secours
Des opérateurs humains toujours indispensables
Malgré cette robotisation avancée, l’humain reste au cœur du dispositif.
Les techniciens travailleront depuis des plateformes mobiles à compensation de gravité, conçues pour manipuler plus facilement les composants lourds et réaliser certaines opérations manuelles.
Ces plateformes permettront aux opérateurs d’intervenir dans les zones les plus complexes de la chambre à vide tout en conservant une grande précision de mouvement.
Des répliques géantes pour s’entraîner
Afin de préparer les opérations réelles, ITER construit également des maquettes grandeur nature de la chambre à vide.
Deux grandes structures métalliques reproduisant chacune un tiers du tokamak serviront de terrain d’entraînement :
- l’une dans l’ancien atelier du cryostat
- l’autre dans un bâtiment en construction sur le site
Les opérateurs pourront ainsi se familiariser avec les robots et répéter les procédures avant l’assemblage réel.
Deux années d’assemblage quasi continu
Lorsque tous les systèmes seront prêts, la phase d’installation dans la chambre à vide fonctionnera à un rythme industriel.
Le plan actuel prévoit :
- 24 heures sur 24
- 6 jours sur 7
- pendant environ deux ans
Ce sera l’une des phases les plus spectaculaires du chantier ITER : une chorégraphie permanente de robots, d’outils et d’opérateurs travaillant de concert pour transformer une immense cavité métallique en le premier réacteur expérimental capable de produire un plasma de fusion de 500 MW.
À ce moment-là, la symphonie technologique imaginée aujourd’hui prendra véritablement vie !
Les dernières avancées sur ITER : le chantier entre dans sa phase la plus délicate
Le chantier d’ITER a connu ces derniers mois plusieurs avancées majeures qui montrent que le projet entre progressivement dans sa phase d’assemblage réel du réacteur. La chambre à vide commence désormais à prendre forme dans le puits du tokamak, tandis que les gigantesques bobines magnétiques et les structures de support continuent d’être installées autour de la machine.
L’installation récente du quatrième module de secteur (avec une tolérance mécanique réduite à 0,4 millimètre seulement lors du levage) illustre le niveau de précision désormais atteint. Si le calendrier a été révisé ces dernières années, ces opérations marquent un tournant : pour la première fois, les différentes briques technologiques du tokamak commencent à converger physiquement vers la configuration finale du réacteur expérimental.
Avancées récentes du chantier ITER :
| Événement / étape | Date | Description | Importance technique |
| Installation du module de secteur n°7 | 2025 | Premier segment de la chambre à vide installé dans le puits du tokamak | Début concret de l’assemblage de la cuve |
| Installation du module n°6 | 2025 | Confirmation de la procédure de levage et d’alignement | Validation des systèmes de métrologie |
| Installation du module n°5 | 2025 | Optimisation des séquences de descente et d’ajustement | Amélioration du protocole d’assemblage |
| Installation du module n°8 | 29 janvier 2026 | Levage de 1 300 t avec seulement 0,4 mm de marge sous charge | Démonstration de la précision mécanique requise |
| Mise en place des plateformes robotisées d’assemblage | 2025-2026 | Développement des robots et outils pour installer ~20 000 composants internes | Préparation de l’équipement interne du tokamak |
| Construction de maquettes de chambre à vide | 2025-2026 | Structures d’entraînement pour opérateurs et robots | Simulation des opérations d’assemblage complexes |
| Objectif futur : premier plasma | horizon ~2035 | Début des expériences de fusion deutérium-deutérium | Validation scientifique du concept ITER |
Sources :
ITER Organization, Robots : outils et opérateurs au diapason (consulté en 2026),
article expliquant le rôle croissant de la robotique dans l’assemblage et la maintenance du réacteur expérimental ITER, avec des exemples d’outils téléopérés, de systèmes de manipulation à distance et de coordination entre opérateurs humains et machines.
CEA Cadarache – ITER, La robotique au service d’ITER (consulté en 2026),
publication institutionnelle présentant les technologies robotiques développées pour intervenir dans les environnements complexes du tokamak, notamment pour l’inspection, l’assemblage et la maintenance d’équipements exposés à de fortes contraintes thermiques et radiologiques.

{kind=link}